Abilityの革新的なマルチレンズカメラソリューションは、比類なきイメージング能力を提供します。驚異的な180/360度パノラマ、高度な複合イメージセンサー融合技術、そして正確な深度検知立体画像を実現します。

Abilityの革新的な動的スティッチング技術は、イメージング分野における画期的な突破口です。スティッチング領域を複数の小さなセグメントに分割することで、アルゴリズムがカメラ内部で直接画像をスティッチングし、煩雑なPCやアプリケーションの後処理を不要にします。
従来のスティッチング技術は計算が遅く、画面の歪みを引き起こし、視聴体験に悪影響を与えていました。Abilityの独自の動的アルゴリズムは、異なる距離にある物体の視差をリアルタイムで分析・補正し、自然でシームレスなスティッチング画像を保証します。
複数の画像を1枚のパノラマ画像にスティッチングする際、異なる画像間の差異をどのように処理するかが重要な課題です。これらの差異は主に以下の2つの要因から発生します:
そのため、単一の画像画質調整を超えて、より複雑な方法でこれらの差異を処理する必要があります。
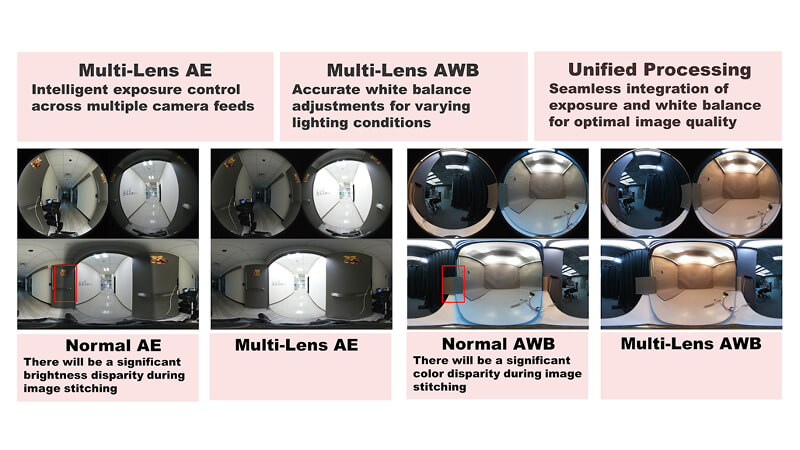
画像差異処理の主要な考慮点:
これらの要素を慎重に処理することで、高品質のスティッチング画像を得ることができ、元のシーンを正確に再現できます。
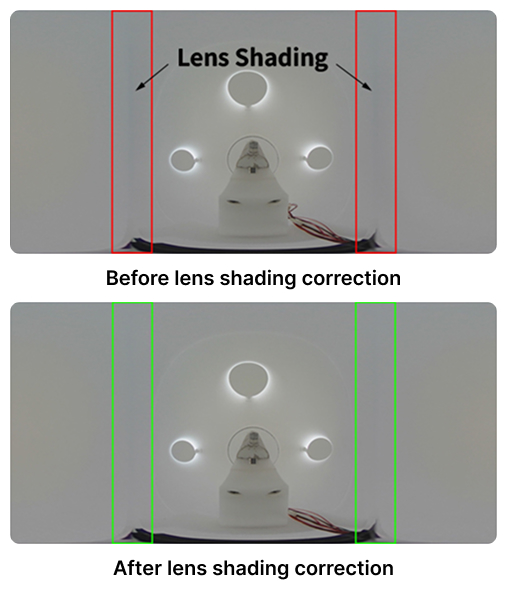
異なるレンズで撮影された画像におけるエッジ部分の輝度不均衡を解消するため、Abilityは事前キャリブレーションプロセスを開発しました。カメラを均一な光を発する積分球内に配置することで、これらの輝度差を正確に測定し補償します。
この事前補正プロセスを導入することで、コストの削減と生産の柔軟性向上を図りつつ、高品質なパノラマスティッチ画像の提供が可能になります。
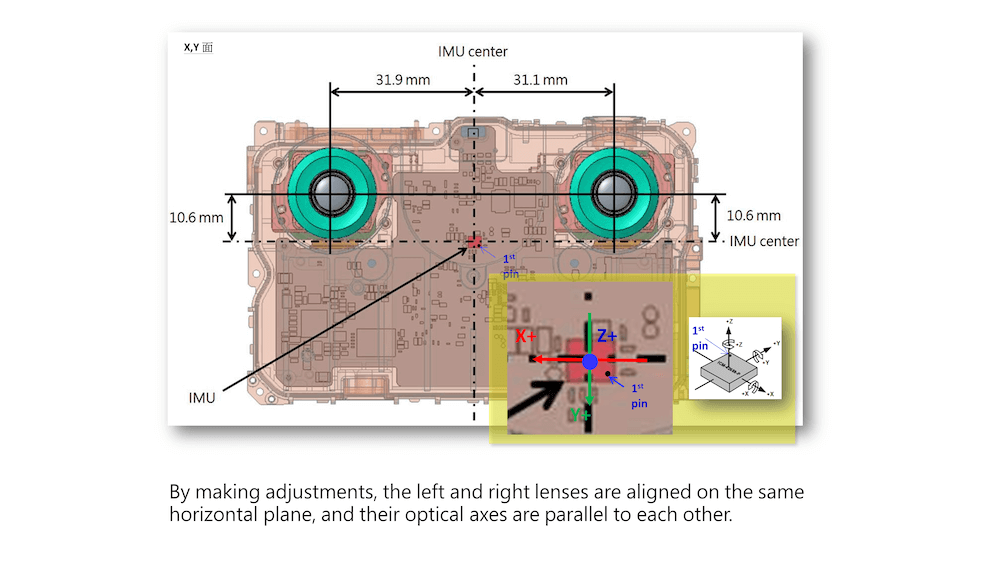
Abilityの水平安定化アルゴリズムは、慣性計測ユニット(IMU)のデータを活用し、イメージセンサーで取得された映像に対してブレ補正を行います。IMUデータを解析することで、カメラの正確な姿勢を特定し、画像フレームに適切な補正を加えます。
Abilityのローリングシャッター補正アルゴリズムは、慣性測定ユニット(IMU)のデータを利用し、CMOSセンサーで発生するローリングシャッターによる「ジェリー効果」を効果的に軽減します。IMUの加速度と角速度データを分析することで、カメラの動作軌跡を正確に計算し、取得された映像を適切に補正します。
ローリングシャッター補正をイメージングシステムに統合することで、映像品質を向上させ、歪みを減少させ、アプリケーション全体の性能を改善できます。
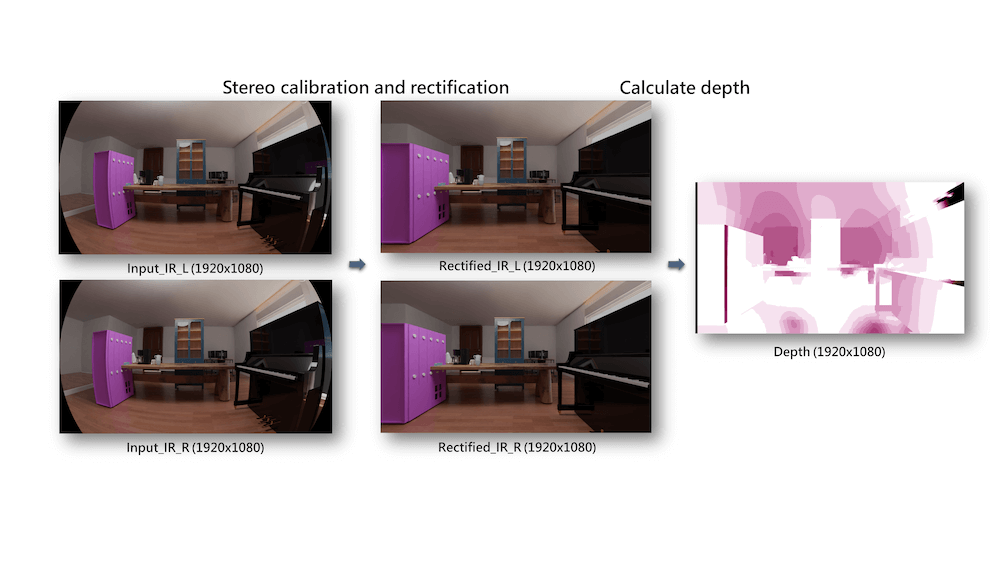
Abilityの立体深度センシングアルゴリズムは、次の2つの重要なステップで構成されています: